



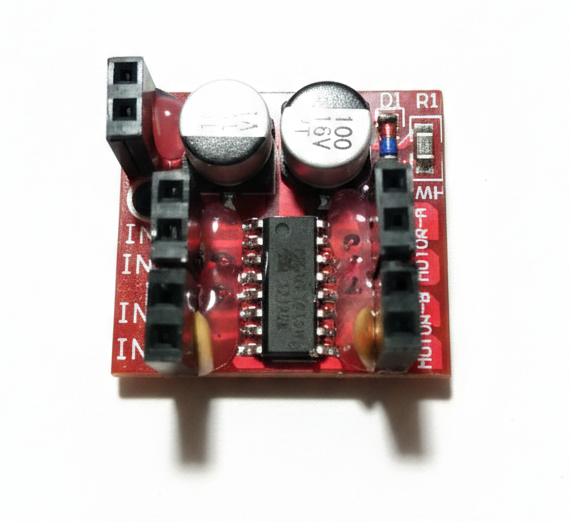
미니 L298N 모듈 주요 성능 사양을 요약
이 모듈은 소형 로봇이나 배터리 구동 기기에 최적화된 초소형 듀얼 H-브리지 모터 드라이버입니다.
1. 주요 사양
- 구동 전압 (Motor Voltage): DC 2V ~ 10V
- 로직 입력 전압 (Signal Voltage): DC 1.8V ~ 7V (아두이노, 라즈베리 파이 등과 호환)
- 출력 전류: * 연속 전류: 채널당 1.5A
- 피크 전류: 최대 2.5A
- 제어 방식: PWM 속도 조절 및 정/역회전 제어 가능
- 대기 전류: 0.1uA 미만 (초절전형)
- 크기: 약 24.7 x 21 x 5 mm (매우 작고 가벼움)
2. 주요 특징
- 듀얼 채널: DC 모터 2개 또는 4선식 2상 스텝 모터 1개를 개별 제어할 수 있습니다.
- 과열 보호: 내장된 열 보호 회로(TSD)가 있어 모터 고정(Stall) 시 과열로 인한 파손을 방지합니다.
- 저발열 설계: 내장된 MOS 스위치의 저항이 낮아 기존 큰 L298N 모듈에 비해 열이 적게 발생하며, 별도의 방열판이 필요 없습니다.
- 안전 회로: 입력단이 떠 있는(floating) 상태에서도 모터가 오작동하지 않도록 설계되어 있습니다.
3. 주의사항
- 전원 극성: 전원의 +와 -를 반대로 연결하면 칩이 즉시 파손될 수 있으니 주의해야 합니다.
- 전압 범위: 10V를 초과하는 전원을 연결하지 마세요. (고전압 모터용이 아닙니다.)
소형 완구, 스마트 카, 소형 로봇 팔 등 낮은 전압(배터리 2~4알 수준)을 사용하는 프로젝트에 매우 적합한 가성비 모델입니다.

micro2iot에 답글 남기기 응답 취소