

폐 프린터에서 추출한 모터는 Japan Servo KP39EM2-011 스텝 모터였습니다.
**일본 서보(JAPAN SERVO CO., LTD.)**에서 제조한 바이폴라(Bipolar) 타입의 스텝 모터입니다. 정확한 모델명은 KP39EM2-011 (EM-240 시리즈)입니다.
1. 주요 스펙 (Label 정보 분석)
- Step Angle (보폭): 1.8 DEG/STEP입니다. 즉, 한 바퀴(360도)를 도는 데 200스텝이 필요합니다.
- 타입: 일반적으로 4개의 선이 나오는 바이폴라 방식입니다.
- 크기: NEMA 14 또는 17 사이즈보다 약간 작거나 슬림한 타입일 가능성이 높으며, 주로 정밀한 위치 제어가 필요한 프린터, 스캐너, 소형 자동화 기기에 사용됩니다.
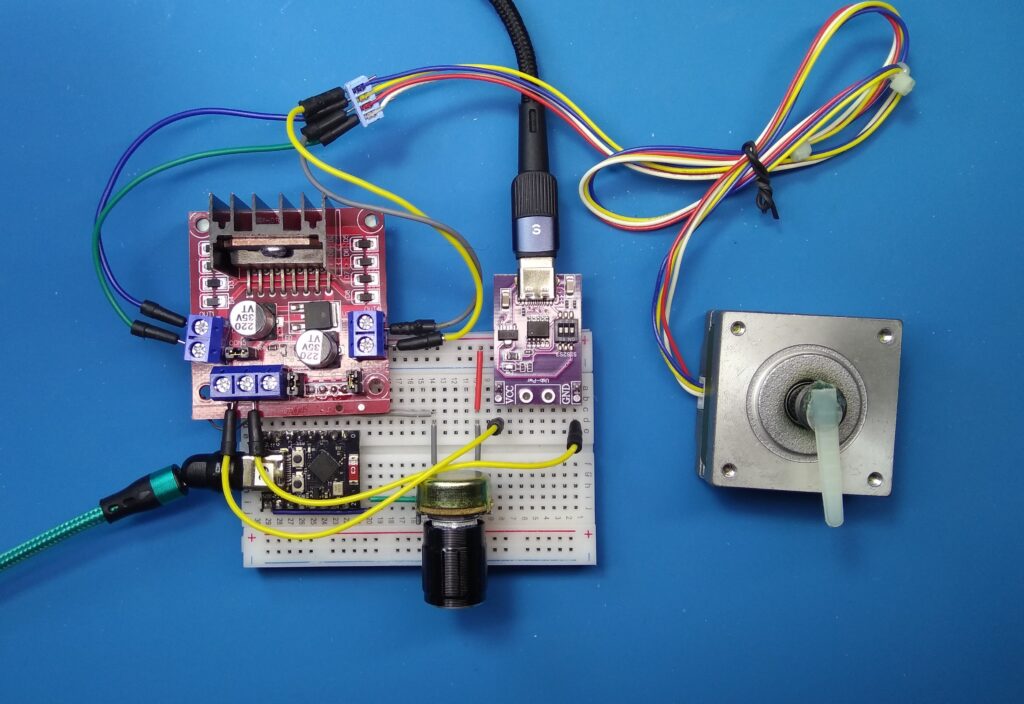
2. L298N 연결
이 모터는 17HS4011과 제어 방식이 동일합니다.
3. 배선 찾기 (가장 중요!)
이 모터는 보통 4가닥의 전선이 연결됩니다. 색상만으로 판별하기 어려울 때는 멀티미터(테스터기)로 통전 테스트를 해서 짝을 찾아야 합니다.
- A상 짝: 선 두 개를 찍었을 때 저항값이 측정되는 한 쌍 (예: 검정-초록) -> L298N의 IN1, IN2 쪽 연결.
- B상 짝: 나머지 저항값이 측정되는 한 쌍 (예: 빨강-파랑) -> L298N의 IN3, IN4 쪽 연결.
⚠️ 사용 시 주의사항
- 전압/전류: 이 모델(EM-240 계열)은 정격 전압이 낮고 전류 소모가 작을 수 있습니다. L298N으로 구동할 때 모터가 너무 뜨거워진다면 전압을 낮추거나 코드의
delay를 조절해야 합니다. - 정밀도: 1.8도 스텝 각도를 가지고 있어 위치 제어가 매우 정확합니다. 과학상자 로봇의 팔을 움직이거나 정밀하게 전진/후진할 때 아주 좋습니다.
Python step.py
** 저소음을 기대하고 pwm 를 사용한 코드. 그다지 효과는 없습니다.
Python step_pwm.py

답글 남기기
댓글을 달기 위해서는 로그인해야합니다.