
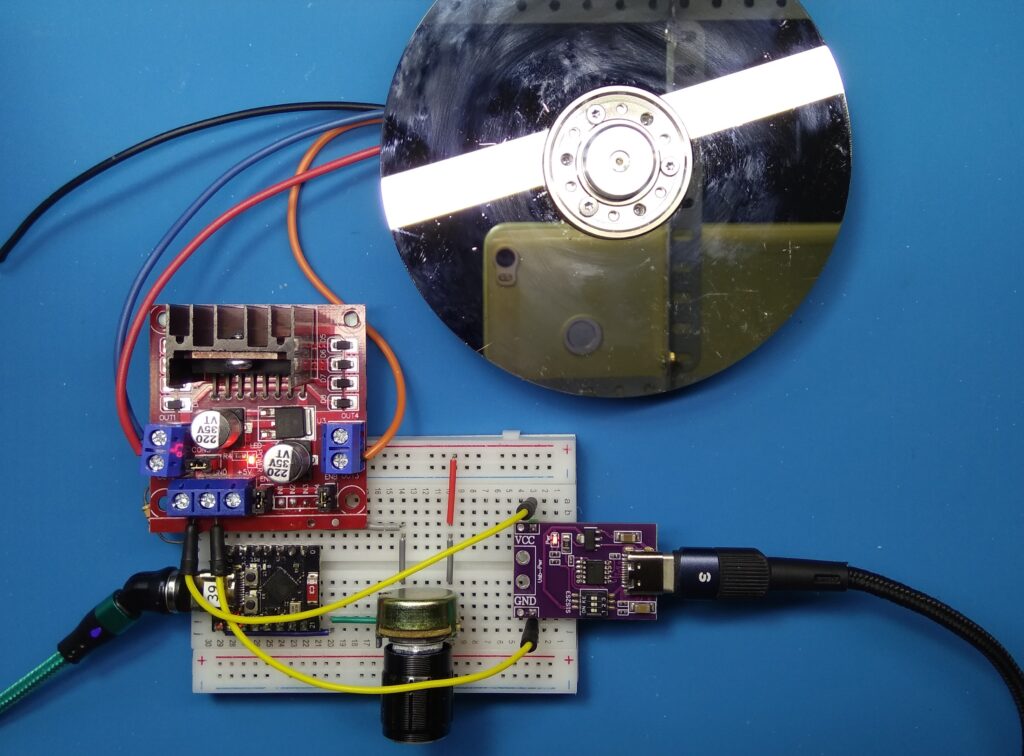
오늘의 프로젝트는 폐하드드라이브 추출 모터 구동 테스트입니다. 결론부터 말씀드리면 ‘절반의 성공, 절반의 실패’입니다. L298N의 전압 강하와 스텝 신호의 한계 때문에 하드디스크 특유의 초고속 회전(7200RPM)을 구현하기엔 역부족이었습니다. 실패를 통해 배운 BLDC 모터의 특성을 공유합니다.
Python spin.py : Test code
- BLDC vs Stepper: “스핀들 모터는 3상 BLDC 방식이라, 일반적인 H-브리지 드라이버로는 위상 제어가 정교하지 못하다.”
- L298N의 한계: “L298N은 전압 강하(1.2V∼3V)가 커서 고속 모터에 전력을 밀어주기 힘들다.”
※ ESC 드라이버 원리
하드드라이브 스핀들 모터 테스트에서 왜 L298N이 실패했는지, 그 해답은 바로 **ESC(Electronic Speed Controller, 전자 변속기)**의 작동 원리에 있습니다.
스핀들 모터는 일반적인 모터와 달리 3상 BLDC(Brushless DC) 모터입니다. 이 모터를 돌리려면 단순히 전기를 주는 게 아니라, 아주 정교한 ‘타이밍’이 필요합니다.
1. ESC의 핵심 역할: “전자식 브러시”
일반 DC 모터는 내부에 물리적인 브러시가 있어 회전할 때 알아서 전극을 바꿔줍니다. 하지만 BLDC(Brushless) 모터는 이름 그대로 브러시가 없습니다. 대신 ESC가 3개의 선(U, V, W)에 번갈아 가며 전류를 흘려 가상의 회전 자기장을 만들어줍니다.
2. 작동 원리 (3상 제어)
ESC는 내부의 MCU와 MOSFET을 사용해 다음 과정을 초고속으로 수행합니다.
- 전류 스위칭: 3개의 코일에 120∘씩 위상차를 두고 전류를 공급합니다. (U→V, V→W, W→U 방식)
- 역기전력(Back-EMF) 감지: 모터가 돌 때 발생하는 미세한 전기를 감지하여, 현재 자석(로터)이 어디쯤 있는지 파악합니다. (센서리스 방식)
- 피드백 루프: 자석의 위치에 딱 맞춰서 다음 코일에 전기를 흘려줍니다. 이 타이밍이 어긋나면 모터가 덜덜거리기만 하고 돌지 않습니다.
3. 왜 L298N으로는 제 성능이 안 났을까?
‘제 속도가 안 나는 현상’의 기술적인 이유는 이렇습니다.
- 제어 방식의 한계: L298N은 단순히 전압을 줬다 뺐다 하는 H-브리지 방식입니다. 스핀들 모터처럼 수천 RPM으로 도는 모터의 ‘역기전력’을 계산해서 타이밍을 맞추는 기능이 없습니다.
- 스위칭 속도: HDD 모터는 7,200RPM 이상으로 돕니다. 이를 위해선 초당 수천 번 전극을 바꿔야 하는데, 일반적인 코딩(Soft PWM)이나 L298N의 반응 속도로는 이 속도를 따라갈 수 없습니다.
- 전압 강하: L298N 내부의 바이폴라 트랜지스터는 열로 에너지를 많이 소비하여, 모터에 충분한 전류를 전달하지 못합니다.
4. ESC를 쓰면 달라지는 점
만약 저가형 알리발 ESC(예: HW-30A 등)나 전용 BLDC 드라이버 칩을 사용하시면:
- 자동 타이밍: 모터의 회전 위치를 스스로 파악해 최적의 효율로 밀어줍니다.
- 고속 회전: 하드디스크 특유의 “키이이잉~” 하는 고주파 소리와 함께 초고속 회전을 볼 수 있습니다.
- 간편한 제어: 마이크로파이썬에서
PWM신호(서보모터와 동일한 방식) 하나만 보내면 속도 조절이 끝납니다.
5. “L298N은 스핀들 모터의 ‘눈(역기전력 감지)’ 역할을 못 해주기 때문에 눈 감고 달리는 것과 같다”
※ pc팬에 있는 자기장 홀센서를 달아서 회전수를 측정해서 u,w,v 변환속도를 조절하게 하면 되지 않을까?
이론적으로는 맞지만 실제로 고급 BLDC 모터들은 **홀 센서(Hall Effect Sensor)**를 내부에 3개 달아서 자석의 위치를 정확히 파악하고 전기를 넣어줍니다. 이를 ‘센서드(Sensored) BLDC’ 방식이라고 합니다.
1. 왜 가능하지만 어려운가?
1) 속도의 장벽 (CPU의 한계) HDD 모터는 보통 7,200 RPM입니다. 초당 120바퀴를 돌죠.
- 3상 제어를 하려면 한 바퀴 돌 때 전극을 6번 바꿔줘야 합니다. (120×6=720번/초)
- 홀 센서 신호를 받아서(Interrupt), 계산하고, L298N에 신호를 쏘는 이 과정을 1.3ms(밀리초) 안에 완벽하게 끝내야 합니다.
- 마이크로파이썬은 인터프리터 방식이라 이 정도 속도로 실시간 피드백을 처리하면 타이밍이 조금만 어긋나도 모터가 “드르륵” 하며 멈춰버립니다.
2) 홀 센서 배치(정렬) 문제 PC 팬은 이미 센서가 최적의 위치에 고정되어 있지만, 하드디스크 모터는 센서가 없습니다.
- 홀 센서를 120∘ 간격으로 아주 정밀하게 배치해야 합니다. 1mm만 틀어져도 위상(Phase)이 꼬여서 효율이 떡락하거나 열만 발생합니다.
3) L298N의 느린 응답속도 L298N 내부의 소자(Bipolar Transistor)는 켜고 꺼지는 속도가 최신 MOSFET에 비해 느립니다. 고속 스위칭을 하려고 하면 신호가 뭉개져서 모터에 제대로 된 힘을 전달하지 못합니다.
※ 홀센서 3개나 달 필요없이 하나만 달아도 회전수는 나오니까 회전수에 비례해서 u,w,v 전환속도만 올려주면 되지 않을까?
1. 회전수만 알면 안 되는 이유: “타이밍(Phase)”
모터가 도는 속도를 알아서 그에 맞춰 전극 전환 속도($Hz$)를 올리는 건 가능합니다. 하지만 자석이 지금 어디 있는지 모르면 이런 상황이 발생합니다.
- 최악의 시나리오: 자석이 코일 앞에 딱 왔을 때 밀어줘야 하는데, 타이밍이 안 맞아서 자석을 뒤에서 잡아당기는 위치에서 전기를 주게 될 수도 있습니다.
- 결과: 모터가 회전력을 얻는 게 아니라, 서로 밀고 당기다가 진동만 커지고 열이 나면서 멈춰버립니다(탈조 현상).
2. 홀센서 1개의 한계
홀센서가 1개라면 “한 바퀴 도는 데 10ms 걸렸네?”라는 건 알 수 있지만, 지금 이 순간 자석이 U번 코일에 있는지 V번 코일에 있는지는 알 수 없습니다.
- 3개일 때: 각 센서가 $120^\circ$ 마다 신호를 주므로, “지금 자석이 V번 통과했으니 U번에 전기를 줘!”라고 실시간 지시가 가능합니다.
- 1개일 때: “방금 자석이 지나갔어! 근데 그다음은… 음… 아마 이 속도면 지금쯤 V번 근처겠지?”라고 추측해서 전기를 줘야 합니다.
[Image showing the 6-step commutation sequence of a BLDC motor compared to a single hall sensor pulse]
3. “오픈 루프” 가속 방식 (Open-loop Acceleration)
사실 주인장님이 말씀하신 방식은 실제 산업 현장에서도 씁니다. 센서 없이 일단 박자에 맞춰서 억지로 돌리는 방식이죠.
- 낮은 주파수에서 모터를 강제로 부들부들 떨게 하며 출발시킵니다.
- 모터가 박자를 타기 시작하면 서서히 주파수를 올립니다.
- 문제점: 조금만 속도를 빨리 올리거나 부하가 걸리면 박자를 놓치고(탈조) 바로 멈춥니다.
🚀 시도해볼 만한 코드 로직 (MicroPython)
만약 정말 해보고 싶으시다면, 홀센서 1개를 Interrupt로 잡아서 **’한 바퀴 도는 시간(T)’**을 계산한 뒤, 다음 바퀴에서 T/6 시간마다 전극을 바꾸는 코드를 짜볼 수는 있습니다.
Python
※ 보다 빠른 아두이노 C 언어로 짜면 좀 더 나을까?
1. C언어로 짜면 나아지는 점 (Software 측면)
- 인터럽트 속도: 센서 신호가 들어오자마자 반응하는 속도가 파이썬보다 수십 배 빠릅니다.
- 직접 제어:
digitalWrite대신 레지스터를 직접 건드리는 방식을 쓰면 나노초(ns) 단위로 전극을 바꿀 수 있어 박자를 놓칠 확률이 줄어듭니다. - 정밀 타이밍:
micros()함수를 이용해 자석의 위치를 훨씬 정교하게 예측할 수 있습니다.
2. 하지만 여전히 안 되는 이유 (Hardware 측면)
문제는 L298N 드라이버 자체에 있습니다.
- 스위칭 손실 (Heat): L298N은 구식 바이폴라 트랜지스터 방식이라, 고속으로 켰다 껐다 하면 내부 저항 때문에 엄청난 열이 발생하고 전압이 깎입니다. 모터에 충분한 에너지가 전달되지 않습니다.
- 역기전력(Back-EMF) 처리 불가능: 7,200 RPM으로 돌면 모터에서 엄청난 역전기가 발생합니다. 전용 ESC는 이 전기를 활용하거나 제어하는데, L298N은 이를 그냥 열로 태워버리거나 칩이 타버릴 수 있습니다.
- 위상 전환의 한계: 최고 속도에 도달하려면 단순히 전기를 주는 게 아니라, 회전 속도에 맞춰 전기를 주는 시점을 앞당기는 ‘진각(Timing Advance)’ 제어가 필요한데, 이걸 생으로 코딩하는 건 거의 박사 학위 수준의 난이도입니다.
※ 최종결론: “돌릴 수는 있으나 제 성능을 발휘하려면 전용 ESC(전자 변속기)나 전용 드라이버 칩이 필요하다”
답글 남기기
댓글을 달기 위해서는 로그인해야합니다.