

안녕하세요! 오늘은 무선 통신 프로젝트의 ‘진한 맛’을 느껴보고 싶어 시작한 RP2040 + CC1101 장거리 통신 프로젝트 제작기를 공유합니다.
1. 왜 ESP32가 아닌 CC1101인가?
많은 분이 묻습니다. “ESP32 쓰면 Wi-Fi도 있고 블루투스도 있는데, 왜 귀찮게 외부 모듈을 쓰나요?” 하지만 엔지니어라면 공감할 CC1101만의 대체 불가능한 매력이 있습니다.
- 압도적인 장애물 투과력: 2.4GHz(Wi-Fi)는 벽 하나만 있어도 신호가 급감하지만, CC1101이 사용하는 Sub-1GHz(433MHz) 대역은 파장이 길어 벽을 타고 넘는 회절성이 뛰어납니다.
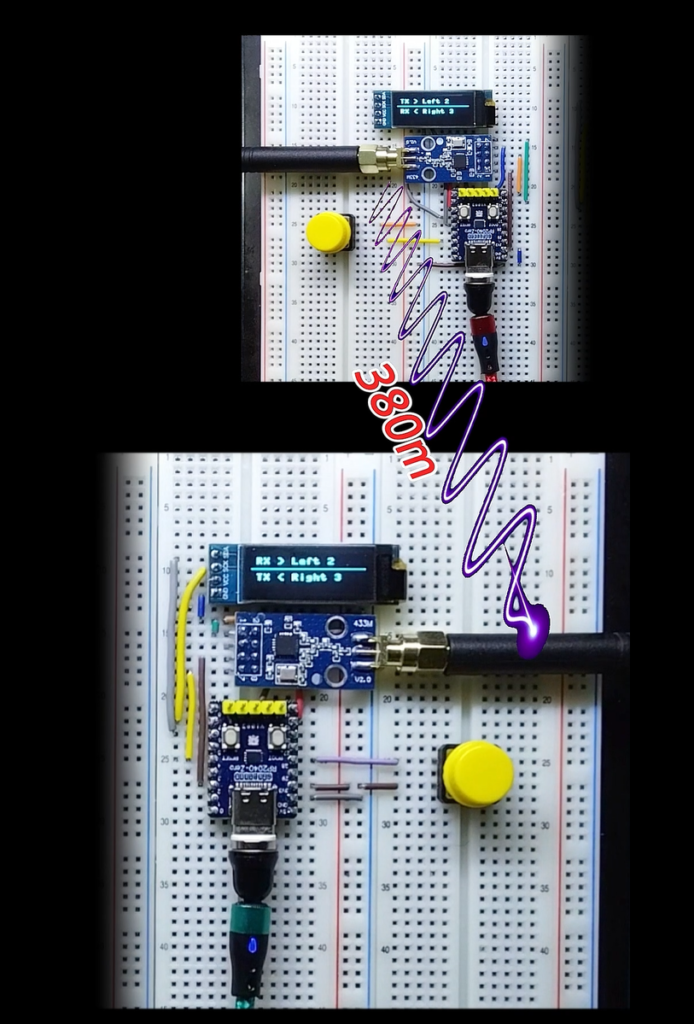
- 미친 통신 거리: 설정만 잘하면 개활지에서 수백 미터, 심지어 1km 가까이 신호를 보낼 수 있습니다.
- 날것의 전파(RAW RF): 표준 프로토콜에 갇히지 않고 주파수부터 데이터 레이트까지 내 입맛대로 주무를 수 있는 진정한 무선의 재미를 줍니다.
2. CC1101의 명암: 장점과 단점
직접 만져보며 느낀 CC1101의 특징을 솔직하게 정리합니다.
👍 장점
- 유연성: 300MHz부터 928MHz까지 광범위한 주파수 설정 가능.
- 저전력: 전송 시 소모 전류가 매우 적어 배터리 구동에 최적화.
- 호환성: 아두이노, STM32, 그리고 이번에 사용한 RP2040까지 SPI 통신만 있다면 어디든 연결 가능.
👎 단점
- 까다로운 초기 설정: 레지스터 값이 수백 개입니다. 하나만 틀려도 통신이 안 됩니다.
- 안테나 의존성: 안테나 길이나 방향에 따라 성능 차이가 극명합니다.
- 간섭 문제: 433MHz는 자동차 리모컨, 무선 벨 등이 많이 써서 나만의 ‘주소(Address)’ 설정이 필수입니다.
3. 하드웨어 연결 (SPI 핀 맵)
RP2040은 하드웨어 SPI 핀이 지정되어 있습니다. 매뉴얼에 명시된 SPI0 또는 SPI1 전용 핀을 반드시 사용해야 합니다.
RP2040배선을 아래 중 하나로 반드시 바꾸셔야 에러가 해결됩니다.
| 기능 | 권장 (SPI 0) | 대안 (SPI 1) |
| SCK | GP2 또는 GP6 | GP10 또는 GP14 |
| MOSI | GP3 또는 GP7 | GP11 또는 GP15 |
| MISO | GP0 또는 GP4 | GP8 또는 GP12 |
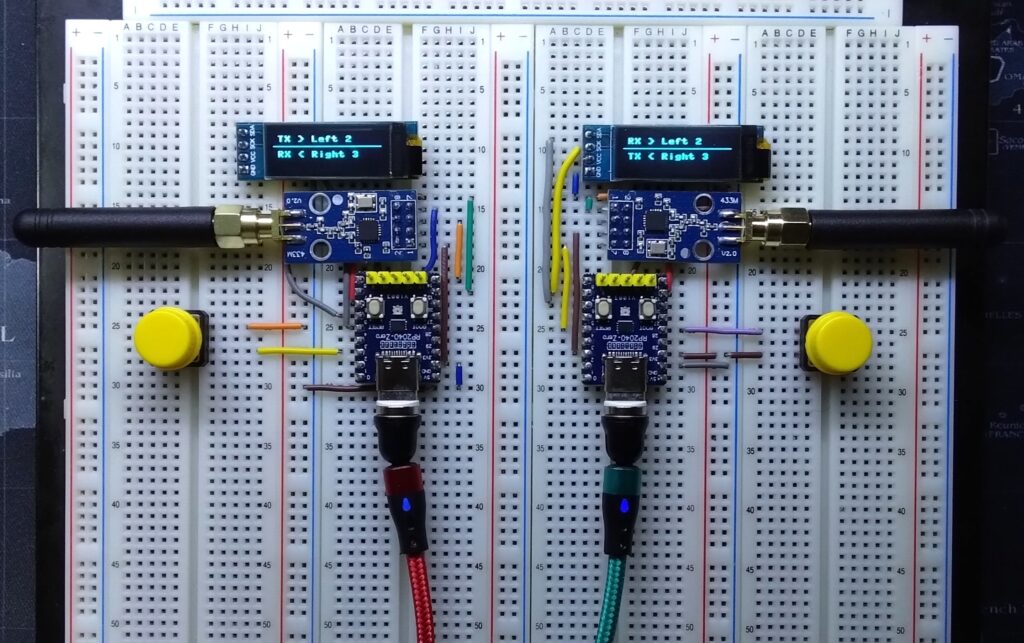
4. 양방향 통신 구현
“CC1101의 기본 동작은 송신 또는 수신 중 한 방향으로만 작동하는 반이중(Half-Duplex) 방식입니다. 이를 극복하기 위해 멀티쓰레딩(Multithreading) 기법을 도입했습니다. 평상시에는 수신 대기 상태를 상시 유지하다가, 송신 이벤트 발생 시에만 즉시 모드를 전환하여 데이터를 전송하고 다시 수신 모드로 복귀하는 로직을 구현함으로써, 사용자 관점에서의 **심리스(Seamless)한 양방향 통신(Bidirectional Communication)**을 완성했습니다.”
5. 장거리 통신
Python cc1101.py
from machine import Pin, SPI
import _thread
import time
# 레지스터 주소 및 상수
WRITE_BURST = 0x40
READ_SINGLE = 0x80
READ_BURST = 0xC0
CONFIG_PKTLEN = 0x06
IDLE_STATE = 0x36
TX_STATE = 0x35
RX_STATE = 0x34
FLUSH_TX = 0x3B
FLUSH_RX = 0x3A
class CC1101:
def __init__(self, spi, cs):
self.spi = spi
self.cs = cs
self.reset()
self.self_test()
self.default_config()
self.packet_len = 16
self.lock = _thread.allocate_lock()
self.on_receive_callback = None # 수신 시 실행할 함수 저장용
self.set_base_frequency(433.0)
self.set_packet_length(16)
def write_reg(self, addr, val):
self.cs.value(0)
self.spi.write(bytearray([addr, val]))
self.cs.value(1)
def read_reg(self, addr):
self.cs.value(0)
self.spi.write(bytearray([addr | READ_SINGLE]))
data = self.spi.read(1)
self.cs.value(1)
return data[0]
def reset(self):
self.cs.value(1)
time.sleep_ms(1); self.cs.value(0); time.sleep_ms(1); self.cs.value(1)
self.cs.value(0)
self.spi.write(bytearray([0x30])) # SRES
self.cs.value(1)
time.sleep_ms(10)
def self_test(self):
# 상태 레지스터 읽기는 반드시 READ_BURST(0xC0) 사용
partnum = self.read_reg(0x30 | READ_BURST)
version = self.read_reg(0x31 | READ_BURST)
print(f"CC1101 확인 - PartNum:{partnum}, Version:{version}")
def default_config(self):
self.write_reg(0x0B, 0x06) # FSCTRL1
self.set_base_frequency(433.0)
self.write_reg(0x10, 0x56) # MDMCFG4 (DRate: 4.8kbps)
self.write_reg(0x11, 0xF8) # MDMCFG3
self.write_reg(0x12, 0x03) # MDMCFG2 (2-FSK, 16/16 sync word bits)
self.write_reg(0x18, 0x18) # MCSM0 (Auto Calibration)
self.write_reg(0x08, 0x04) # PKTCTRL0 (Fixed Length Mode)
self.write_reg(0x06, 16) # PKTLEN (기본 16바이트)
def set_base_frequency(self, freq_mhz):
f = int(freq_mhz * 65536 / 26)
self.write_reg(0x0D, (f >> 16) & 0xFF)
self.write_reg(0x0E, (f >> 8) & 0xFF)
self.write_reg(0x0F, f & 0xFF)
def set_packet_length(self, length):
self.write_reg(0x06, length)
def send_data(self, data):
if isinstance(data, str): data = data.encode()
self.write_reg(IDLE_STATE, 0)
self.write_reg(FLUSH_TX, 0)
self.cs.value(0)
self.spi.write(bytearray([0x3F | WRITE_BURST]))
self.spi.write(data) # 고정 길이 모드에서는 길이를 쓰지 않음
self.cs.value(1)
self.write_reg(TX_STATE, 0)
time.sleep_ms(20) # 전송 시간 보장
def listen(self):
"""수신 모드로 전환"""
self.write_reg(RX_STATE, 0)
def data_received(self):
# RXBYTES 레지스터(0x3B) 확인
rx_bytes = self.read_reg(0x3B | READ_BURST)
return rx_bytes & 0x7F # 하위 7비트가 실제 바이트 수
def receive_data(self, length=16):
self.cs.value(0)
self.spi.write(bytearray([0x3F | READ_BURST]))
payload = self.spi.read(length)
self.cs.value(1)
self.write_reg(IDLE_STATE, 0)
self.write_reg(FLUSH_RX, 0)
return payload
def flush_and_listen(self):
self.write_reg(0x36, 0) # IDLE
self.write_reg(0x3A, 0) # FLUSH_RX
self.write_reg(0x3B, 0) # FLUSH_TX
self.listen()
def send_chat(self, msg_str):
"""외부에서 호출할 송신 메서드"""
full_msg = (msg_str + " " * self.packet_len)[:self.packet_len]
with self.lock:
self.write_reg(0x36, 0)
self.send_data(full_msg)
while (self.read_reg(0xF5 | 0xC0) & 0x1F) == 0x13: # TX 상태 체크
time.sleep_ms(1)
self.flush_and_listen()
def _receiver_thread(self):
"""내부 수신 쓰레드 루프"""
self.flush_and_listen()
while True:
if not self.lock.locked():
with self.lock:
status = self.read_reg(0x3B | 0xC0)
if status & 0x80:
self.flush_and_listen()
elif (status & 0x7F) >= self.packet_len:
data = self.receive_data(self.packet_len)
if data:
try:
msg = data.decode('ascii').strip()
if msg and self.on_receive_callback:
self.on_receive_callback(msg) # 콜백 함수 실행
except: pass
self.flush_and_listen()
if (self.read_reg(0xF5 | 0xC0) & 0x1F) == 0x01:
self.listen()
time.sleep_ms(20)
def start_dual_mode(self, callback):
"""쌍방향 통신 시작 (수신 시 실행할 함수를 인자로 받음)"""
self.on_receive_callback = callback
_thread.start_new_thread(self._receiver_thread, ())
Python left.py
import machine
from machine import Pin, SPI, I2C
import cc1101
import ssd1306
import time
import _thread
# ================= [ 핀 설정 구역 ] =================
# 1. CC1101 (SPI)
RF_SPI_ID = 1
RF_SCK = 14
RF_MOSI = 15
RF_MISO = 8
RF_CS = 6
# 2. SSD1306 (I2C)
OLED_I2C_ID = 0
OLED_SCL = 5
OLED_SDA = 4
# 3. 버튼 (내부 풀업)
BTN_PIN = 2
# =================================================
# --- 객체 초기화 ---
# OLED
i2c = I2C(OLED_I2C_ID, scl=Pin(OLED_SCL), sda=Pin(OLED_SDA), freq=400000)
display = ssd1306.SSD1306_I2C(128, 32, i2c)
# 버튼
btn = Pin(BTN_PIN, Pin.IN, Pin.PULL_UP)
# CC1101
spi = SPI(RF_SPI_ID, baudrate=5000000, polarity=0, phase=0,
sck=Pin(RF_SCK), mosi=Pin(RF_MOSI), miso=Pin(RF_MISO))
cs = Pin(RF_CS, Pin.OUT, value=1)
rf = cc1101.CC1101(spi, cs)
rf.set_base_frequency(433.0)
rf.set_packet_length(16)
# 전역 변수
tx_display = "READY"
rx_display = "WAITING..."
def draw_ui(invert=False):
"""화면을 그리는 함수 (invert=True면 반전효과)"""
display.fill(0)
if invert:
display.fill(1) # 배경을 하얗게
color = 0 # 글씨를 검게
else:
color = 1 # 글씨를 하얗게
# 상단: TX 상태
display.text("TX > " + tx_display, 5, 4, color)
display.hline(0, 16, 128, color)
# 하단: RX 상태
display.text("RX < " + rx_display, 5, 22, color)
display.show()
def my_receive_handler(message):
global rx_display
rx_display = message
# [쇼츠 연출] 수신 시 화면 2번 깜빡이기
for _ in range(2):
draw_ui(invert=True)
time.sleep_ms(100)
draw_ui(invert=False)
time.sleep_ms(100)
# 쌍방향 모드 시작
rf.start_dual_mode(my_receive_handler)
draw_ui()
print("🎬 쇼츠 촬영 준비 완료!")
last_btn_state = 1
msg_count = 0
try:
while True:
btn_state = btn.value()
# 버튼 눌림 감지 (Falling Edge)
if last_btn_state == 1 and btn_state == 0:
msg_count += 1
msg_to_send = f"Left {msg_count}"
tx_display = "SENDING..."
# [쇼츠 연출] 송신 시 '슈슉' 지나가는 애니메이션
for i in range(0, 128, 32):
display.scroll(16, 0)
draw_ui(invert=True)
time.sleep_ms(20)
rf.send_chat(msg_to_send)
tx_display = msg_to_send
draw_ui()
time.sleep_ms(300) # 디바운싱
last_btn_state = btn_state
time.sleep_ms(10)
except KeyboardInterrupt:
print("\nSTOP")
Python right.py
import machine
from machine import Pin, SPI, I2C
import cc1101
import ssd1306
import time
import _thread
# ================= [ 핀 설정 구역 ] =================
# 1. CC1101 (SPI)
RF_SPI_ID = 0
RF_SCK = 2
RF_MOSI = 3
RF_MISO = 4
RF_CS = 15
# 2. SSD1306 (I2C)
OLED_I2C_ID = 1
OLED_SCL = 7
OLED_SDA = 6
# 3. 버튼 (내부 풀업)
BTN_PIN = 28
# =================================================
# --- 객체 초기화 ---
# OLED
i2c = I2C(OLED_I2C_ID, scl=Pin(OLED_SCL), sda=Pin(OLED_SDA), freq=400000)
display = ssd1306.SSD1306_I2C(128, 32, i2c)
# 버튼
btn = Pin(BTN_PIN, Pin.IN, Pin.PULL_UP)
# CC1101
spi = SPI(RF_SPI_ID, baudrate=5000000, polarity=0, phase=0,
sck=Pin(RF_SCK), mosi=Pin(RF_MOSI), miso=Pin(RF_MISO))
cs = Pin(RF_CS, Pin.OUT, value=1)
rf = cc1101.CC1101(spi, cs)
rf.set_base_frequency(433.0)
rf.set_packet_length(16)
# 전역 변수
tx_display = "READY"
rx_display = "WAITING..."
def draw_ui(invert=False):
"""화면을 그리는 함수 (invert=True면 반전효과)"""
display.fill(0)
if invert:
display.fill(1) # 배경을 하얗게
color = 0 # 글씨를 검게
else:
color = 1 # 글씨를 하얗게
# 상단: TX 상태
display.text("TX < " + tx_display, 5, 22, color)
display.hline(0, 16, 128, color)
# 하단: RX 상태
display.text("RX > " + rx_display, 5, 4, color)
display.show()
def my_receive_handler(message):
global rx_display
rx_display = message
# [쇼츠 연출] 수신 시 화면 2번 깜빡이기
for _ in range(2):
draw_ui(invert=True)
time.sleep_ms(100)
draw_ui(invert=False)
time.sleep_ms(100)
# 쌍방향 모드 시작
rf.start_dual_mode(my_receive_handler)
draw_ui()
print("🎬 쇼츠 촬영 준비 완료!")
last_btn_state = 1
msg_count = 0
try:
while True:
btn_state = btn.value()
# 버튼 눌림 감지 (Falling Edge)
if last_btn_state == 1 and btn_state == 0:
msg_count += 1
msg_to_send = f"Right {msg_count}"
tx_display = "SENDING..."
# [쇼츠 연출] 송신 시 '슈슉' 지나가는 애니메이션
for i in range(0, 128, 32):
display.scroll(16, 0)
draw_ui(invert=True)
time.sleep_ms(20)
rf.send_chat(msg_to_send)
tx_display = msg_to_send
draw_ui()
time.sleep_ms(300) # 디바운싱
last_btn_state = btn_state
time.sleep_ms(10)
except KeyboardInterrupt:
print("\nSTOP")



micro2iot에 답글 남기기 응답 취소